This is a project that ressembles the classic Game of Life, but implemented in a 3D world. The project needs OpenGL 4.5 or greater to render, and currently only compiles under Linux (although it would be relatively easy to change CMakeLists to compile for Windows/macOS*(apple discontinued OpenGL support in favor of Metal)).
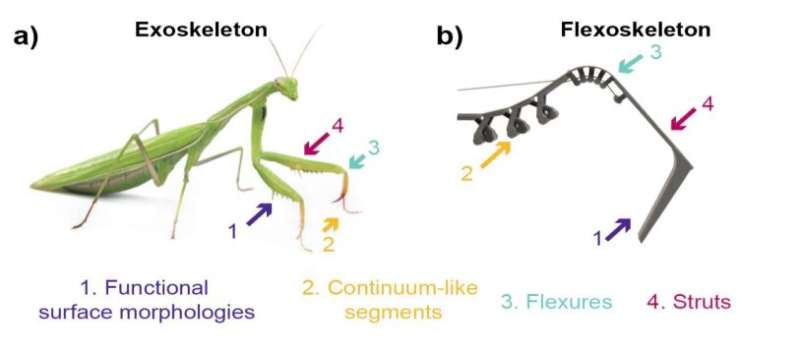
Insects typically have a variety of complex exoskeleton structures, which support them in their movements and everyday activities. Fabricating artificial exoskeletons for insect-inspired robots that match the complexity of these naturally-occurring structures is a key challenge in the field of robotics.
Although researchers have proposed several fabrication processes and techniques to produce exoskeletons for insect-inspired robots, many of these methods are extremely complex or rely on expensive equipment and materials. This makes them unfeasible and difficult to apply on a wider scale.
With this in mind, researchers at the University of California in San Diego have recently developed a new process to design and fabricate components for insect-inspired robots with exoskeleton structures. They introduced this process, called flexoskeleton printing, in a paper prepublished on arXiv.
“Inspired by the insect exoskeleton, we present a new fabrication process called ‘flexoskeleton’ printing that enables rapid and accessible fabrication of hybrid rigid/soft robots,” the researchers wrote in their paper.
So far, hybrid robots with both rigid and soft components have been typically built using expensive materials and 3-D printers, as well as multi-step casting and machine processes. In their study, the research team at UC San Diego set out to create a new fabrication method that is cheaper and easier to use.
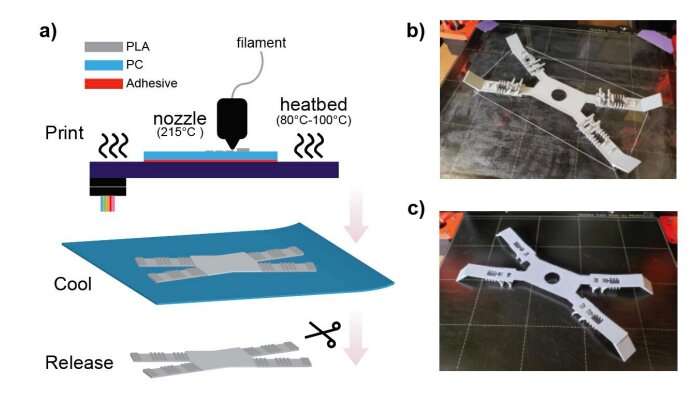
a) A figure explaining how the printing process introduced by the researchers works. b) A four-legged robot created using the researchers’ method, immediately after printing on clear PC layer. c) The four legged robot after release from the PC layer. Credit: Jiang, Zhou & Gravish.
Flexoskeleton printing, the method they developed, relies on an adaptation of a consumer grade fused deposition material (FDM) 3-D printer, which provides an extremely strong bond strength between the deposited material and the printer’s flexible base layer. This process can be used to create exoskeletons for insect-inspired robots with different shapes and morphologies.
Remarkably, the fabrication approach proposed by the researchers can be used by both novice and expert users, as it is fairly straightforward and easy to understand. It is also far more affordable than alternative fabrication methods, as the materials and equipment it relies on are considerably cheap and readily available.
In their study, the team demonstrated the feasibility of their approach by using it to design and test a wide variety of canonical flexoskeleton elements. They then combined all the elements they produced into a walking four-legged robot with a flexible exoskeleton structure.
“The approach we have developed relies heavily on the interrelationships between three dimensional geometry of surface features and their contributions to the local mechanical properties of that component,” the researchers wrote in their paper. “We envision that this method will enable a new class of bio-inspired robots with focus on the interrelationships between mechanical design and locomotion.”
In the future, the new design and fabrication process devised by this team of researchers could enable the development of numerous insect-inspired robots. As the technique is far more straightforward and affordable than most existing methods, it could also make existing or new robots easier to scale up, increasing their chances of being produced in larger quantities and appearing on the market.
Imitating the nematode’s nervous system to process information efficiently, this new intelligent system is more robust, more interpretable, and faster to train than current deep neural network architectures with millions of parameters.
Deep Neural Networks And Other Approaches
Researchers are always looking for new ways to build intelligent models. We all know that really deep supervised models work great when we have sufficient data to train them, but one of the hardest things to do is to generalize well and do it efficiently. We can always go deeper, but it has a high computation cost. So as you may already be thinking, there must be another way to make machines intelligent, needing less data or at least fewer layers in our networks.
One of the most complicated tasks that machine learning researchers and engineers are currently working on is self-driving cars. This is a task where every option needs to be covered, and completely stable, to be able to deploy it on our roads. This process of training a self-driving car typically requires many training examples from real humans as well as a really deep neural network able to understand these data and reproduce the human behaviors in any situation ….
The Quietrevolution-Gorlov helical turbine (GHT) is a water turbine evolved from the Darrieus turbine design by altering it to have helical blades/foils. The physical principles of the GHT work are the same as for its main prototype, the Darrieus turbine, and for the family of similar vertical axis wind turbines which includes also Turby wind turbine, aerotecture turbine, Quietrevolution wind turbine, etc. GHT, Turby and Quietrevolution solved pulsatory torque issues by using the helical twist of the blades.
The resulting work, all mechanically printed completely on a 3D printer. A DC motor with a permanent magnet serves as a generator. The motor voltage at the output is 1.8V / 1 RPS.